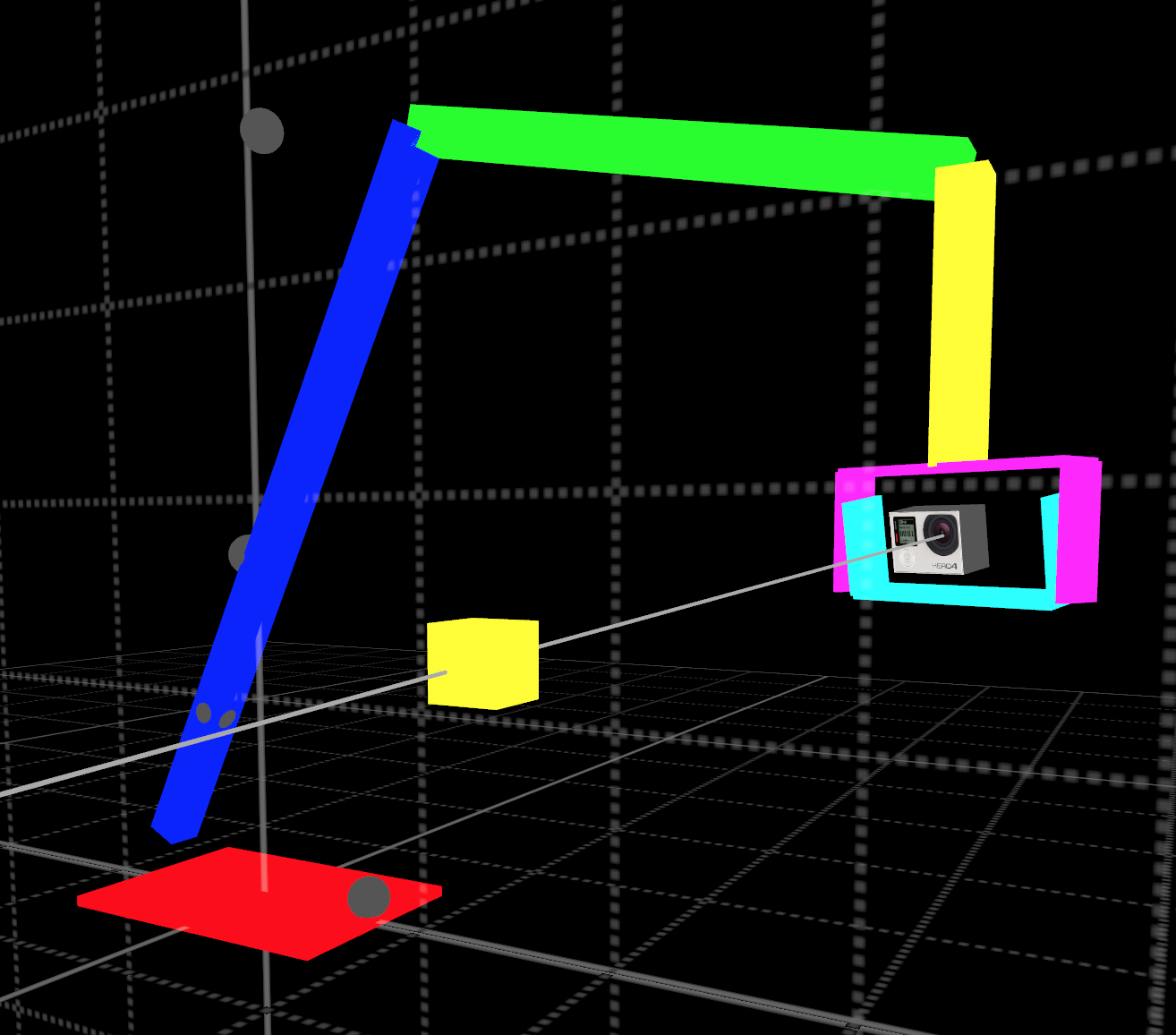
Bras articulé 4 axes
Piloté par ordinateur avec un logiciel écrit en Cocoa, mû par des moteurs pas-à-pas et équipé d'une nacelle caméra, ce bras devient une grue de cinéma censée offrir des mouvements de caméra fluides et reproductibles.
Je me suis lancé dans ce projet de fabrication en en voyant bien les difficultés et en pensant pouvoir m'en tirer... Mais les difficultés l'on emporté (provisoirement :-) et l'objet en l'état a trop de défauts pour pouvoir être utilisé. Je jette l'éponge :-/. Et puis il m'a valu une belle blessure à la main ce qui a achevé de me démotiver.
Le logiciel (écrit en Cocoa / Objective-C) n'est pas si mal. J'y ai combiné les facilité de sceneKit pour la manipulation du modèle 3D du bras et simplifier quelques calculs en sautant du système de coordonnées d'une jointure à un autre. J'ai par ailleurs affiné les fonctions de stream du G-Code vers GRBL, voici les 2 fonctions dédiées à cette tâche :
-(void)received:(NSString*)str {
NSString * ss = str;
BOOL command = NO;
if ([ss isEqualToString:@"ok"]) {
if (isRunning) {
int toRemove = [[lengths objectAtIndex:processedUntil] intValue];
processedUntil = processedUntil + 1;
buffer = buffer - toRemove;
} else {
command = YES;
}
} else if (![ss isEqualToString:@"Grbl 0.9j ['$' for help]"]) {
// response from command or error !
command = YES;
} else {
// welcome message
command = YES;
NSLog(@"%@", ss);
}
if (buffer <=(100) && command==NO) {
if (isRunning) {
[self sendLines];
}
}
}
-(void)sendLines {
if (index < lines.count) {
NSString * dd = @"";
full = NO;
while(full == NO) {
if (index < lines.count) {
int ff = (buffer + [[lengths objectAtIndex:index] intValue]);
if(ff <= 127) { // ajouter une ligne à ce qui va être envoyé
NSString * s = [lines objectAtIndex:index];
dd = [dd stringByAppendingString:s];
buffer = buffer + (int)(s.length);
index = index + 1;
if (index >= lines.count) {
//NSLog(@">>>>>>>>>> END");
break;
}
} else { // buffer is overloaded (while break)
full = YES;
break;
}
}
}
if (dd.length > 0) {
//NSLog(@"%@", dd);
[self.arduino appendToConsole:dd];
[self.arduino writeString:dd];
}
} else {
isRunning = NO;
NSLog(@">>>>>>>>>> END");
}
}
Quelques détails
Les degrés de liberté sont l'épaule et le coude (pour les translations de la tête) d'une part, et les deux orientations "pan" et "tilt" d'autre part (rotation de la tête). Un 5ème axe est prévu : la rotation de la base dans le plan horizontal.
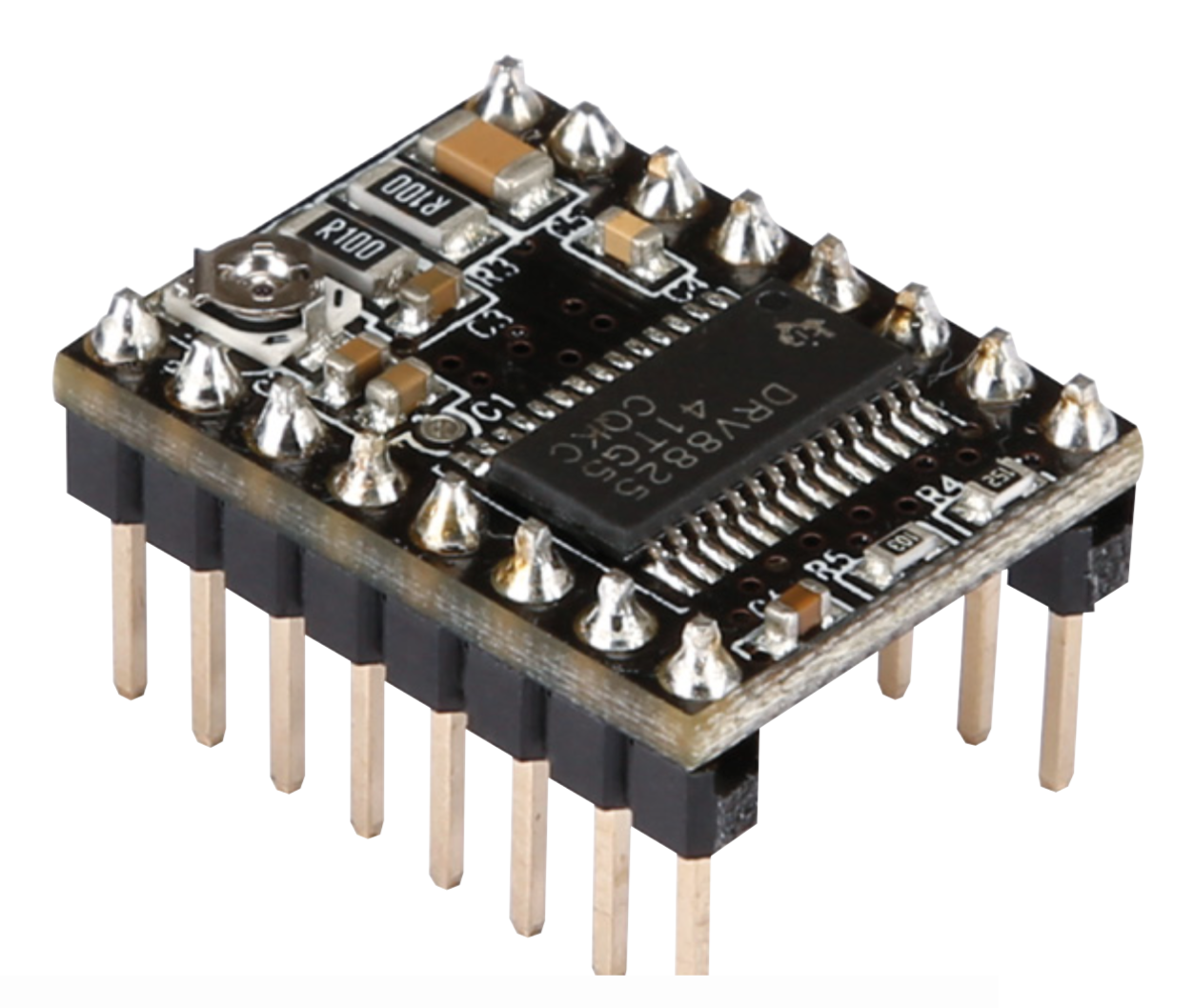
Les 4 drivers de moteurs pas-à-pas sont basés sur le circuit intégré DRV8825 (2 ampères par phase max) et offrent plusieurs précision de microstepping. Ils reçoivent leurs ordres de deux Arduinos nano qui embarquent chacun GRBL 0.9.
J'ai opté pour un entraînement par tiges filetées et une construction en bois.
Mes objectifs étaient les suivants :
- Bras assez long et fin (150 cm d'extension)
- Fonctionnement fluide (mouvements de caméra doux)
J'étais prêt à accepter :
- une faible vitesse maximum
- une précision / reproductibilité de positionnement médiocre (centimétrique)
Contraintes additionnelles :
- Un bruit pas trop élevé
- faible coût (récupération, pas d'achat de pièce mécanique trop spécialisée)
Aspects logiciel :
- Pilotage simultané de deux instances de GRBL (double gestion des buffers, coordination...)
- Résolution analytique du problème géométrique de cinématique inverse (nous ne sommes pas dans le cadre trivial du chariot XYZ.)
- dessiner des trajectoires et les exécuter
- suivre un objet (calculs de "look at")
- Représentation 3D interactive.
- prise en charge de la caméra (via une carte Blackmagic Design Intensity shuttle (thunderbolt)
Difficultés rencontrées :
- Accouplement coaxial entre les arbres des moteurs et les tiges filetées : très difficile en pratique sans tour à métaux. L'excentricité ou mauvais alignement entraînent des erreurs périodiques et de fortes vibrations (selon la vitesse).
- Ces vibrations de basse fréquence entrent en résonance avec le bras (fréquence propre d'oscillation du bras à cause de ses flexions).
- Les tiges filetées + écrous ne sont pas un entraînement très efficace, il faudrait leur préférer des vis à billes. Beaucoup de frottements et d'usure.
- Concernant l'orientation de la caméra, malgré les 200 pas par tour, le micro-stepping et une démultiplication par 5, les rotations sont saccadées à basse vitesse.
- Difficile de coordonner les translations et rotations : comme ces deux tâches sont réalisées par deux instances séparées de GRBL, je n'ai pas d'interpolation entre ces deux mouvements.
- Beaucoup trop de bruit !
Quelques réflexions
- Les moteurs pas-à-pas sont bien pratiques mais apportent leur lot de problèmes (bruits, vibrations, saccades à basse vitesse)
- Quel design d'interface pour le pilotage temps-réel ? (absence de fonction de jogging dans GRBL 0.9 ici, mais disponible sur avec la version 1.1. à essayer.